flexlib: Robuste Biomechanik mit Hysterese und Rust-Geschwindigkeit
Wie Hysterese im Schmitt-Trigger-Stil eine zuverlaessige Zustandserkennung in verrauschten Wearable-Daten ermoeglicht, und warum wir Python mit Rust ueber Maturin kombinieren.
Unser FlexTail-Software-Oekosystem: Biomechanische Analyse vorantreiben
flexlib ist unsere Python-Bibliothek zur Verarbeitung und Analyse von Daten des Wearable-FlexTail-Sensors, konzipiert fuer Robustheit in der Praxis und wissenschaftliche Tiefe.
Was flexlib leistet
- Dateneinlesen aus CSV- und RSF-Formaten.
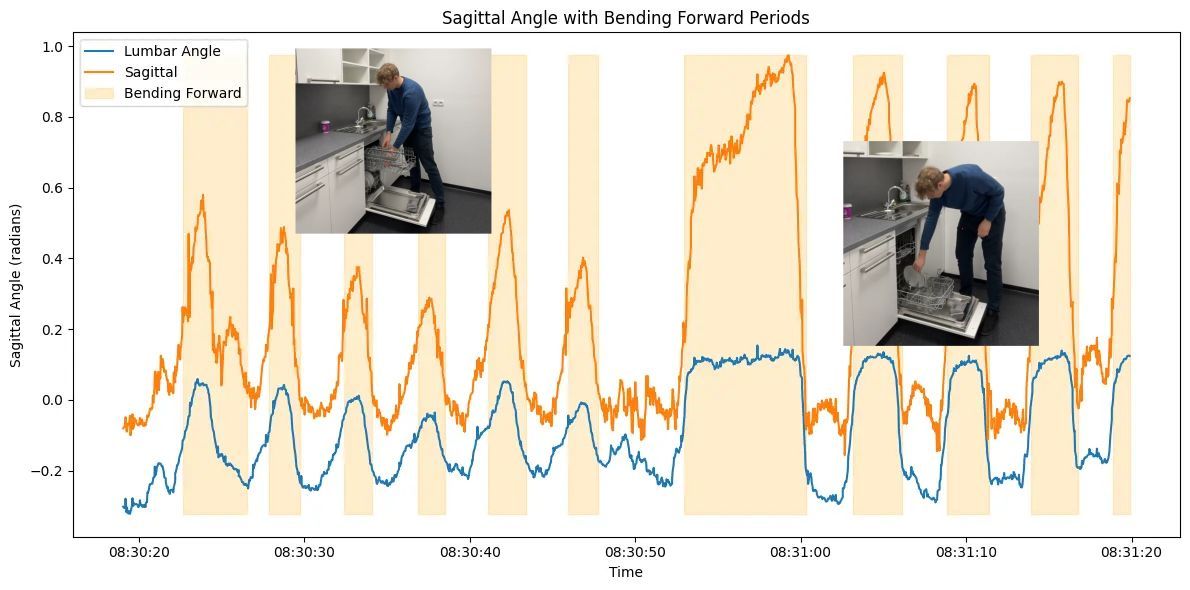
- Signalanalyse mit hysterese-basierter Zustandserkennung.
- Biomechanische Kenngroessen wie sagittale Flexion, Lateralflexion und Rotation.
Die Staerke eines hybriden Ansatzes: Python trifft Rust via Maturin
Wir implementieren leistungskritische Komponenten in Rust - wegen seiner aussergewoehnlichen Geschwindigkeit und Speichersicherheit - und exponieren sie ueber Maturin gegenueber Python. Das gibt Data Scientists eine vertraute Schnittstelle, waehrend native Performance fuer grossskalige Verarbeitung geliefert wird.
Warum Hysterese bei verrauschten Signalen wichtig ist
Wearable-Sensordaten koennen verrauscht sein. Hysterese loest dieses Problem durch die Einfuehrung von zwei Schwellenwerten und einem Gedaechtnis des vorherigen Zustands - oft implementiert mit einem Schmitt-Trigger. Es filtert transiente Stoerungen heraus und verhindert schnelles Umschalten, wenn der Eingang um einen einzelnen Grenzwert pendelt.
Vorteile:
- Rauschunterdrueckung ohne intensive Glaettungsfilter.
- Bewahrung scharfer, bedeutsamer Uebergaenge.
- Deterministisches Verhalten unter Grenzfallbedingungen.
Referenzen
Weitere Informationen zu flexlib und dem FlexTail-System findest du auf den MinkTec-Entwicklerseiten.
Bereit für bessere Haltung?
Entdecke, wie rectify dir helfen kann, deine Haltung nachhaltig zu verbessern.
Jetzt entdecken