Wie Rectify deine Wirbelsäule in 3D vermisst
Der FlexTail misst die Wirbelsäule direkt. 18 Segmente, kartesische 3D-Koordinaten in Echtzeit. So funktioniert es.
Kein Instrument misst heute die vollständige 3D-Form der menschlichen Wirbelsäule über einen Arbeitstag, eine Nacht Schlaf oder eine Woche Rehabilitation.
Klinische Bildgebung liefert einen Schnappschuss pro Termin. Optische Motion-Capture-Systeme verlassen das Labor nicht. Wearable-IMU-Arrays driften innerhalb von Minuten und können nicht erkennen, wo entlang der Wirbelsäule die Beugung entsteht.
Das Ergebnis ist ein blinder Fleck, der den Großteil des menschlichen Lebens umfasst.
Rückenschmerzen sind die führende Ursache für Beeinträchtigungsjahre weltweit [1]. Muskel-Skelett-Erkrankungen belegen in Deutschland Rang zwei unter allen Krankheitsursachen von Fehlzeiten — 17,8 % der verlorenen Arbeitstage im Jahr 2024 [2].
Diese Messlücke beschränkt sich nicht auf die Grundlagenforschung. SPINE20, ein globales Netzwerk von 38 Wirbelsäulengesellschaften, identifizierte das Fehlen kontinuierlicher Verlaufsdaten in seinen 2025er G20-Empfehlungen als systemische Barriere für evidenzbasierte Politik.
Was eine IMU misst – und was nicht
IMU steht für Inertial Measurement Unit. Das Gyroskop einer IMU misst Winkelgeschwindigkeit — wie schnell sich ein Körper dreht. Den Winkel selbst misst es nicht.
Um aus Winkelgeschwindigkeit einen Winkel zu berechnen, muss integriert werden. Jeder Integrationsschritt enthält einen kleinen Messfehler. Dieser summiert sich mit der Zeit auf. Winkelschätzungen müssen deshalb regelmäßig über Magnetometer-Fusion oder statische Neukalibrierung korrigiert werden — was bei Langzeitaufnahmen zu Artefakten führt [3].
In der Praxis weisen Multi-IMU-Arrays Winkelfehler von mehr als 5° auf, einschließlich Yaw-Drift [3].
Der Wo-Fehler: Ein Sensor sieht nicht, wo die Kurve beginnt
Ein einzelner IMU am Brustkorb misst die globale Neigung des Oberkörpers im Verhältnis zur Schwerkraft. Er sagt, wie weit der Rumpf geneigt ist — nicht, woher diese Neigung stammt [4].
45 Grad Vorwärtsneigung. Was ist passiert?
Möglichkeit A: Hip-Hinge. Hüfte gebeugt, Lendenwirbelsäule in neutraler Lordose. Bandscheiben gleichmäßig belastet.
Möglichkeit B: Hyperkyphose. Hüfte gestreckt, Lendenwirbelsäule krümmt sich unter Last. Intradiskaler Druck steigt steil an.
Der Sensor sieht beides als identisches Signal [4]. Diese Unterscheidung ist klinisch essenziell: Die biomechanischen Konsequenzen eines Hip-Hinge mit neutraler Lendenwirbelsäule sind völlig anders als die einer lumbalen und thorakalen Hyperkyphose unter Last.
Arrays aus mehreren IMUs können teilweise helfen — aber der Ansatz skaliert schlecht. Ganzkörperanzüge mit bis zu 17 Bluetooth-Knoten sind thermisch unangenehm und über längere Aufnahmen schwer zuverlässig zu synchronisieren. Starre kinematische Modellannahmen weichen häufig von der physiologischen Realität ab. Alle Inertialsysteme bleiben dem Gyroskop-Drift ausgesetzt [4].
Das Prinzip des FlexTail: Krümmung direkt messen
Der FlexTail ist ein 0,9 mm dünner Sensorstreifen aus Polyethylenterephthalat (PET) mit 36 aufgedruckten Dehnungsmessstreifen-Paaren, die entlang seiner Länge verteilt sind.
Jedes Paar sitzt symmetrisch zur Mittellinie. Das Messprinzip: differenzielle Dehnung. Wenn sich der Streifen mit der Wirbelsäule biegt, erfährt die konvexe Seite Zugspannung — die konkave gleichzeitig Druckspannung. Diese mechanischen Spannungen verändern den elektrischen Widerstand der aufgedruckten Sensorspuren proportional zur lokalen Verformung.
Krümmung wird direkt gemessen, nicht durch Integration von Winkelgeschwindigkeit berechnet. Das unbegrenzte Integrationsrauschen, das IMU-Systeme über lange Aufnahmen degradiert, entsteht dabei nicht. Verbleibender Rest-Drift im System bleibt begrenzt und wird algorithmisch von der Software verwaltet [4].
Ist die Belastung asymmetrisch — eine Seite stärker gedehnt als die andere —, kodiert das Verhältnis der beiden Signale eines Paares die lokale axiale Torsion. Da nahezu alle realen Wirbelsäulenbewegungen sagittale Flexion mit Torsion verbinden, ist diese simultane Erfassung beider Freiheitsgrade aus einem einzigen Paar ein wesentlicher Vorteil [4].
Räumliche Verankerung und 3D-Rekonstruktion
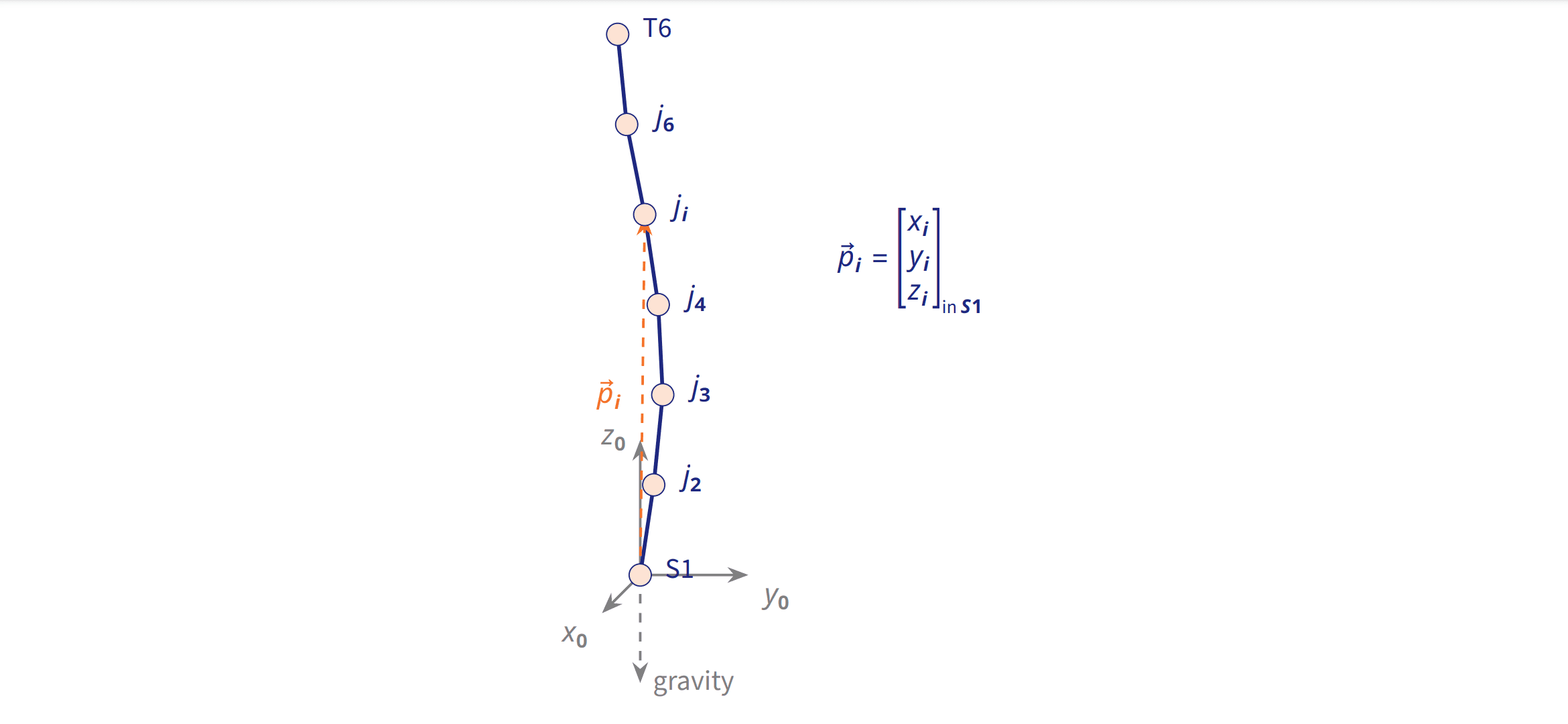
Die Dehnungsmessstreifen erfassen die relative Form der Wirbelsäule — wie jedes Segment relativ zu seinem Nachbarn gekrümmt ist. Um diese Form in einem gravitationsbasierten Koordinatensystem zu verankern, sitzt eine sechsachsige IMU (Drei-Achs-Beschleunigungsmesser und Drei-Achs-Gyroskop) im Basisgehäuse auf Höhe des Kreuzbeins (S1).
Die Software liest Nickwinkel und Rollwinkel des Sakrums kontinuierlich und nutzt sie als gravitationsbasierten Ankerpunkt für die kinematische Kette. Von dort berechnet sie die Koordinaten der 18 virtuellen Gelenke aufwärts — durch sukzessive Matrixmultiplikation entstehen absolute kartesische 3D-Koordinaten (in mm) jedes Segments zu jedem Zeitpunkt.
Validierte Genauigkeit [4]: Gemittelt über zehn Sensoren auf anatomischen Wirbelsäulenvorlagen: 1,05° mittlerer Winkelfehler, 2,95 mm Positionsfehler (MAE). Bestes Einzelgerät: 0,84° Winkelfehler, 2,54 mm Positionsfehler. Diese Werte entsprechen klinischen Oberflächenmessgeräten — bei kontinuierlicher ambulanter Nutzung.
Was das für die Praxis bedeutet
IMUs leisten wertvolle Arbeit in ihrem Einsatzgebiet: Kurzzeitmessungen wie Ganganalyse, Sprungkraft oder Armrotation im Sport funktionieren gut.
Was IMUs strukturell nicht leisten: segmentale Wirbelsäulenmessung über Stunden, ohne mindestens drei Sensoren zur Becken-Wirbelsäulen-Differenzierung, ohne laborähnliche Kalibrierung.
Ergonomie-Ingenieure in Betrieben benötigen verlässliche Daten zur kumulativen Wirbelsäulenbelastung über ganze Schichten.
Physiotherapeuten in der Rehabilitation wollen wissen: Wendet der Patient die gelernten Bewegungsmuster im Alltag an? Nutzt er den Hip-Hinge beim Heben? Ein Sensor, der die gesamte Wirbelsäulenkurve segmental sieht, kann das beantworten.
Klinische Forschung zu Skoliose, Kyphose und Bandscheibendegeneration braucht präzise Verlaufsdaten über Wochen und Monate. Die segmentale 3D-Rekonstruktion ist dabei nicht optional — sie ist die Messgröße selbst.
Fazit
Drift ist keine Firmware-Schwäche. Es ist Mathematik: Wer Winkel aus Winkelgeschwindigkeit berechnet, integriert — und Integration akkumuliert Fehler.
Dehnungsmessstreifen umgehen das strukturell. Sie messen Krümmung direkt, ohne zeitliche Integration. Verbleibender Rest-Drift bleibt begrenzt und wird softwareseitig verwaltet.
Der FlexTail liefert, was segmentale Wirbelsäulenmessung braucht: eine vollständige, segmentale 3D-Abbildung der Wirbelsäule. Nicht eine Neigung. Eine Form.
Quellen
[1] Hartvigsen J, Hancock MJ, Kongsted A, et al. What low back pain is and why we need to pay attention. The Lancet. 2018;391(10137):2356–67. DOI: 10.1016/S0140-6736(18)30480-X
[2] DAK-Gesundheit. DAK-Gesundheitsreport 2025. Hamburg: DAK-Gesundheit; 2025.
[3] Madgwick SOH, Harrison AJL, Vaidyanathan R. Estimation of IMU and MARG orientation using a gradient descent algorithm. IEEE International Conference on Rehabilitation Robotics (ICORR). 2011. DOI: 10.1109/ICORR.2011.5975346
[4] Masch A, Walkling J, Sander L, Deserno TM. Evaluating FlexTail: A Wearable Device for Spinal Posture Tracking. Biomedical Engineering / Biomedizinische Technik. 2025; ahead of print.
Bereit für bessere Haltung?
Entdecke, wie rectify dir helfen kann, deine Haltung nachhaltig zu verbessern.
Jetzt entdecken