How Rectify Measures Your Spine in 3D
The FlexTail measures the spine directly. 18 segments, real-time Cartesian 3D coordinates. Here's how it works.
No instrument today measures the complete 3D shape of the human spine across a working shift, a night of sleep, or a week of rehabilitation.
Clinical imaging delivers one snapshot per visit. Optical motion-capture systems never leave the lab. Wearable IMU arrays drift within minutes and cannot tell where along the spine flexion originates.
The result is a blind spot that spans the majority of human life.
Back pain is the leading cause of years lived with disability worldwide [1]. Musculoskeletal diseases rank second among all causes of sick leave in Germany — 17.8% of lost working days in 2024 [2].
This measurement gap is not confined to basic science. SPINE20, a global network of 38 spine societies, identified the absence of continuous monitoring data in its 2025 G20 recommendations as a systemic barrier to evidence-based policy.
What an IMU Measures — and What It Doesn’t
IMU stands for Inertial Measurement Unit. The gyroscope inside an IMU measures angular velocity — how fast a body rotates. It does not measure the angle itself.
To calculate an angle from angular velocity, integration is required. Each integration step contains a small measurement error. These errors accumulate over time. Angle estimates must therefore be periodically corrected via magnetometer fusion or static recalibration — introducing artefacts in long-duration recordings [3].
In practice, multi-IMU arrays show angular errors exceeding 5°, including yaw drift [3].
The Location Error: A Sensor That Doesn’t Know Where the Curve Begins
A single IMU on the thorax measures the global inclination of the upper torso relative to gravity. It tells you how far the trunk is tilted — not where along the spine that tilt originates [4].
45 degrees of forward inclination. What happened?
Option A: Hip hinge. Hip flexed, lumbar spine in neutral lordosis. Discs evenly loaded.
Option B: Hyperkyphosis. Hip extended, lumbar spine flexes under load. Intradiscal pressure rises steeply.
The sensor sees both as an identical signal [4]. This distinction is clinically essential: the biomechanical consequences of hip-hinge flexion with a neutral lumbar spine are entirely different from those of lumbar and thoracic hyperkyphosis under load.
Arrays of multiple IMUs can partially resolve this — but the approach scales poorly. Full-body suits with up to 17 Bluetooth nodes are thermally uncomfortable and difficult to synchronise reliably over extended recordings. Rigid kinematic model assumptions frequently diverge from physiological reality. All inertial systems remain subject to gyroscope drift [4].
The FlexTail Principle: Measuring Curvature Directly
The FlexTail is a 0.9 mm flexible sensor strip of polyethylene terephthalate (PET) carrying 36 printed strain-gauge pairs distributed along its length.
Each pair is arranged symmetrically about the sensor centreline. The measurement principle: differential strain. When the strip bends with the spine, the convex side experiences tensile stress while the concave side experiences compressive stress simultaneously. These mechanical stresses alter the electrical resistance of the printed gauge traces in proportion to the local deformation.
Curvature is measured directly — not computed by integrating angular velocity. The unbounded integration noise that degrades IMU-only systems over extended recordings does not arise. Any residual drift in the system remains bounded and is managed algorithmically by the companion software [4].
When loading is asymmetric — one side stretched more than the other — the ratio of the two signals from a gauge pair encodes the local axial torsion. Since nearly all real-world spinal movements combine sagittal flexion with some degree of torsion, this simultaneous capture of both degrees of freedom from a single pair is a key architectural advantage [4].
Spatial Anchoring and 3D Reconstruction
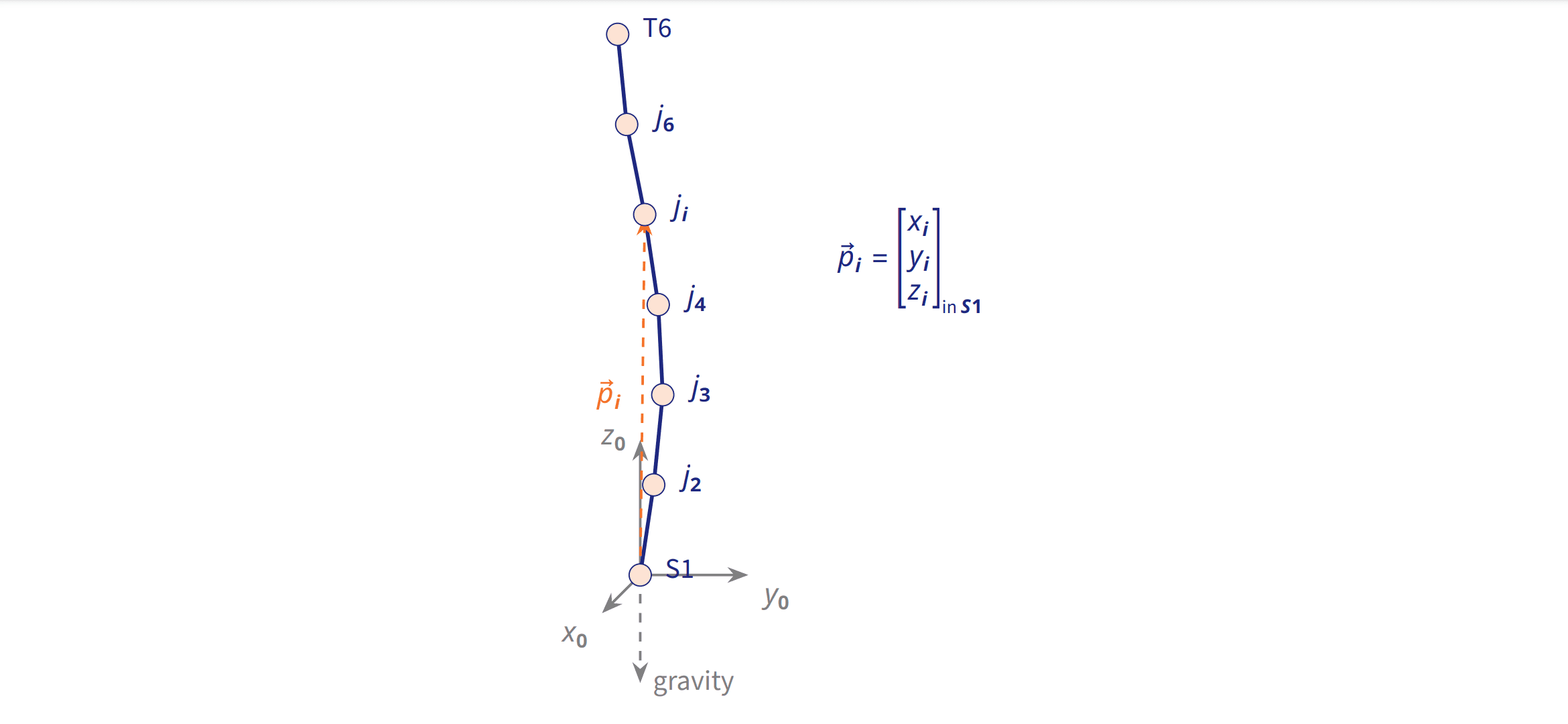
The strain gauges capture the relative shape of the spine — how each segment curves relative to its neighbour. To express this shape in a gravity-referenced coordinate frame, a six-axis IMU (three-axis accelerometer and three-axis gyroscope) is fixed at sacral level (S1).
The software reads the sacral pitch and roll continuously and uses them as the gravitational anchor for the kinematic chain. Starting from this anchored base orientation, it calculates the coordinates of 18 virtual joints upward — successive matrix multiplication yields absolute 3D Cartesian coordinates (in mm) for each segment at each time step.
Validated accuracy [4]: Averaged across ten sensors on anatomical spine templates: 1.05° mean angular error, 2.95 mm position MAE. Best individual device: 0.84° angular error, 2.54 mm position MAE. These values match clinical surface instruments — achieved continuously, in the field.
What This Means in Practice
IMUs do valuable work in their domain: short-duration measurements like gait analysis, jump force, or arm rotation in sport work well.
What IMUs structurally cannot do: segmental spinal measurement over hours, without at least three sensors for pelvis-spine differentiation, without laboratory-grade calibration.
Ergonomics engineers need reliable data on cumulative spinal load across full shifts.
Physiotherapists in rehabilitation want to know: is the patient applying learned movement patterns at home? Using the hip hinge when lifting? A sensor that sees the entire spinal curve segmentally can answer that.
Clinical research on scoliosis, kyphosis, and disc degeneration needs accurate longitudinal data over weeks and months. Segmental 3D reconstruction is not optional here — it is the measurement variable itself.
Conclusion
Drift is not a firmware weakness. It is mathematics: calculating an angle from angular velocity requires integration — and integration accumulates error.
Strain gauges circumvent this structurally. They measure curvature directly, without time integration. Residual drift stays bounded and is managed by software.
The FlexTail delivers what segmental spine measurement requires: a complete, segmental 3D map of the spine. Not a tilt. A shape.
Sources
[1] Hartvigsen J, Hancock MJ, Kongsted A, et al. What low back pain is and why we need to pay attention. The Lancet. 2018;391(10137):2356–67. DOI: 10.1016/S0140-6736(18)30480-X
[2] DAK-Gesundheit. DAK-Gesundheitsreport 2025. Hamburg: DAK-Gesundheit; 2025.
[3] Madgwick SOH, Harrison AJL, Vaidyanathan R. Estimation of IMU and MARG orientation using a gradient descent algorithm. IEEE International Conference on Rehabilitation Robotics (ICORR). 2011. DOI: 10.1109/ICORR.2011.5975346
[4] Masch A, Walkling J, Sander L, Deserno TM. Evaluating FlexTail: A Wearable Device for Spinal Posture Tracking. Biomedical Engineering / Biomedizinische Technik. 2025; ahead of print.
Ready for better posture?
Discover how rectify can help you sustainably improve your posture.
Discover now